
























作品詳情
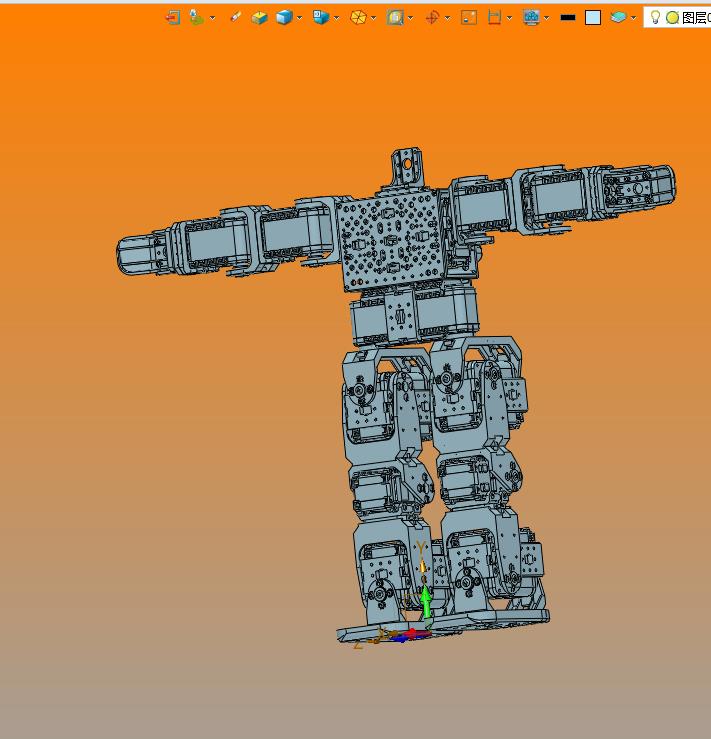
通過仿真軟件模擬多關節(jié)電機驅動的機器人行走過程,涉及機器人動力學、控制理論及計算機仿真技術。機器人通過多個關節(jié)電機協(xié)調運動,實現(xiàn)復雜步態(tài)和軌跡規(guī)劃。仿真過程需精確建模電機運動學及動力學特性,并優(yōu)化算法以實現(xiàn)穩(wěn)定行走。這一過程涉及多學科融合,對機器人技術研發(fā)具有重要意義。
全國咨詢熱線: 152 1011 0562 


















